
当环境模型未知时,强化学习如何从动态规划走向 Monte Carlo、TD、SARSA 与 Q-learning。
上一篇笔记, 已经从"为什么要用RL" 引领到了"如何用MDP相关理论解决RL问题"的门前, 并介绍了策略迭代和价值迭代两种方法. 但是, 这通常要求我们知道环境的动态模型 (比如状态转移概率P和奖励函数R), 但是在训练一个Agent当中, 我们往往无法获得这个模型. 所以接下来的路径自然就是深入各种免模型RL算法, Q-learning、Policy Gradient等算法, 它们是将LLM与RL结合的关键工具.
实际上, 因为我们主要学习的是思想, 要侧重理解这个公式的输入、输出、为什么要用这个公式, 另外还有一个就是代码中何处运用了这个公式. 经过笔记一的训练应该已经进入了RL的语境, 所以现在会弱化推导的过程, 至于代码的运用, 将会在后面的笔记中专门实验.
一. 进化 — model-based to model-free
在很多实际问题中, 马尔可夫决策过程的模型可能是未知的, 具体而言, 我们不知道状态转移函数与奖励函数. 比如,围棋、雅达利游戏、控制直升机、股票涨跌等问题…… 但是我们仍然想让Agent学习到如何行动, 怎么办呢?
既然舍弃了建模, 那就需要有东西去替代它的作用, 显而易见, 这个东西就是数据. 读者可以回忆 (回去翻) 笔记(一) 中的标题下小字, 那里提到了蒙特卡洛的算法. 因为这种算法是model-free的, 所以我觉得放在这里介绍比较合适.
这些数据在概率论中被称为采样 (Sample) , 而在强化学习中通常会被称为经验 (Experience) .
二. 动态规划的方法 (Dynamic Programming , DP)
在介绍具体的model-free方法之前, 有一点需要解释. 回顾笔记(一)中的MDP决策控制, 我们使用了策略迭代和价值迭代两种方法, 当然, 他们都是model-based算法, 但是要是从算法层面来说明的话, 他们都属于动态规划.
动态规划适合于解决满足最优子结构和重叠子问题的. 因为我们已经得到了一种迭代的公式, 所以我们可以通过自举 (bootstrapping) 的方法不停地迭代贝尔曼方程, 当最后更新的状态和上一个状态区别不大的时候, 更新就可以停止, 我们就可以输出最新的 作为它当前的状态的价值. (注: 自举是指更新时采用了估计, 例如动态规划和时序差分都是; 蒙特卡洛则是采样).
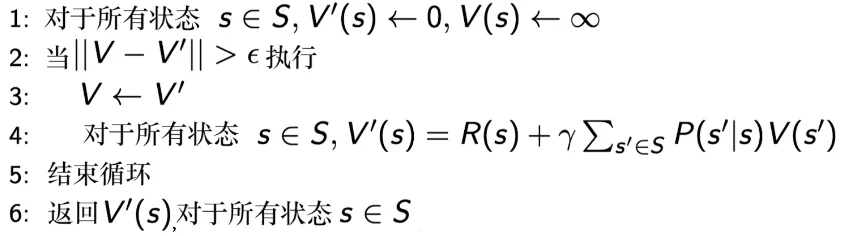
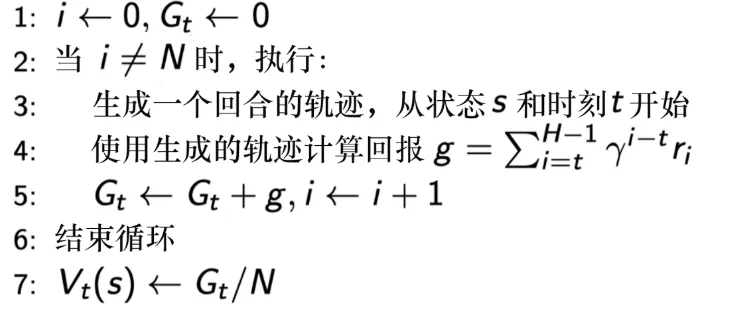
对于简单的MRP过程, 我们可以总结这个过程如下:
而如果引入智能体的动作成为MDP, 那就是笔记(一)中介绍的两种迭代: 策略迭代和价值迭代了.
再提一嘴, 不是说model-based的方法就一定不好, 也不是说只有上面说过的两种, 但是他们都是比较基础的开端. 近些年也有继续在model-based领域深挖的, 基于模型的强化学习 (Model-Based Reinforce Learning, MBRL), 这里提供一个工具库: facebookresearch/mbrl-lib: Library for Model Based RL . 该领域致力于通过数据估计出模型, 继而进行强化学习, 而不是直接用数据.
三. 蒙特卡洛方法 (Monte Carlo, MC)
1. MRP的MC
同样, 我们先用MRP这个随波逐流的过程来看MC的价值评估方法, 借此来说明MC的思想. 当得到一个马尔可夫奖励过程后, 我们从某个状态开始, 把agent放在状态转移矩阵里面, 让它"随波逐流", 这样就会产生一个轨迹. 产生一个轨迹之后, 就会得到一个奖励, 那么直接把折扣的奖励即回报 算出来之后, 积累起来得到回报. 当累积到一定数量的轨迹之后, 我们直接用 除以轨迹数量, 就会得到某个状态的价值.
2. MDP的MC
通过上述例子我们就可以知道, MC是通过采样轨迹代替概率轨迹, 采样轨迹奖励的均值代替奖励函数. 这实际上就是依赖于大数定律: 只要我们获得足够多的轨迹, 就可以趋近于价值函数 (因为价值函数的定义就是用期望 ), 即当 时, . 虽然我们不能通过迭代求解贝尔曼方程的方法得到价值函数, 但是我们仍然可以用采样来做策略评估.
(1) MC Basic
注意, 本算法的效果极差, 基本是没法用的状态. 但是却是后面优化的起点, 并且非常清晰的揭示了如何从model-based跨向model-free, 所以必须首先介绍.
现在需要正式跨向model-free, 通过MRP中的MC我们已经可以知道如何通过采样来近似出概率从而得到价值函数. 但是在更复杂的MDP中, 策略不是能通过采样总结出来的, 而是要主动选择的. 因此, 我们的想法是, 回到策略迭代的算法中, 把里面依赖模型的算法替换掉, 从而得到MDP中的model-free算法.
首先回顾策略迭代的两个步骤, 策略评估和策略更新. 当时我们是借用Q值的迭代, 并证明了最优情况下的V就是采取最优行动Q的价值. 这里Q值非常关键, 我们回归得出Q值的地方, Q值最原始最基本的定义是学习笔记(一)里的6.6, 当时我们由于是知道奖励函数和状态转移概率的, 所以我们使用贝尔曼公式的工具, 直接推到出了其公式6.8. 实际上, 这里前面的 部分还能继续展开, 因为它是累积的总汇报, 完全写开之后就是这种形式:
然后, 模型的更新依赖于Q值. 继续推导, 可以得到式2.1.2表示Q可以由迭代来更新, 然后得到的更新策略的方法就是让Q更大:
策略迭代依赖于Q值, Q值依赖于贝尔曼公式道出的递归式, 递归式的求解依赖于动态规划的方法…… 本来是严丝合缝的逻辑, 但是目前, 环境未知, 自然就不可能得到p和r, 这种方法作废.
那么现在回到最原始的定义 (上一章的式6.6), 它目前还不依赖于模型
这是一个随机变量的期望值进行估计的过程, 或者说这是一个均值估计的过程. 而MC就可以求解, 其中 是对随机变量的采样, 用来估计 :
现在我们来梳理一下算法的过程, 首先我们会给出一个初始策略 , 并且在第k步迭代中, 会有以下两步: Step1: policy evaluation. 计算得到所有(s, a)的Q值, 方法就是之前说过的MC采样. Step2: policy improvement. 第二步和策略迭代算法一样, 选出Q表中最大的值, 开始迭代.
我们可以说, MC Basic算法就是Policy Iteration算法的一个变形, 将其基于模型计算Q值的部分改为了基于采样估计. 另外, Policy Iteration中是先计算V再转成Q, 而MC Basic就是直接估计Q, 这是因为V转化成Q的过程也依赖于模型, 这是肯定不行的. 详见笔记(一)的马尔可夫决策过程控制.
(2) MC Exploring Starts
MC Basic虽然思想直观, 但是却非常低效, 所以我们对其进行推广, 让其更高效.
(3) MC -Greedy
1- 的概率按照Q函数执行动作, 概率的可能会随机探索. 通常情况下, 是一个比较小的值. 数学上可以证明, 任意 贪心策略 都是对 对改进, 优化是单调的.
四. 时序差分学习 (temporal-difference learning, TD)
TD (时序差分) 学习是RL中非常经典的算法, 它结合了动态规划和蒙特卡洛的优点, 实现了单步更新. Q-learning和SARSA是TD学习的典型代表, 前者属于离策略(off-policy)学习, 后者则是同策略(on-policy)方法.
1. DP, MC和TD
到现在, 我们已经学完了DP和MC, 知道了DP和MC的区别最大在于是否model-based. 但是TD和这两者的区别是什么呢. 接下来, 我们可以从统一的视角, 来看一看这三种算法更新的备份图:
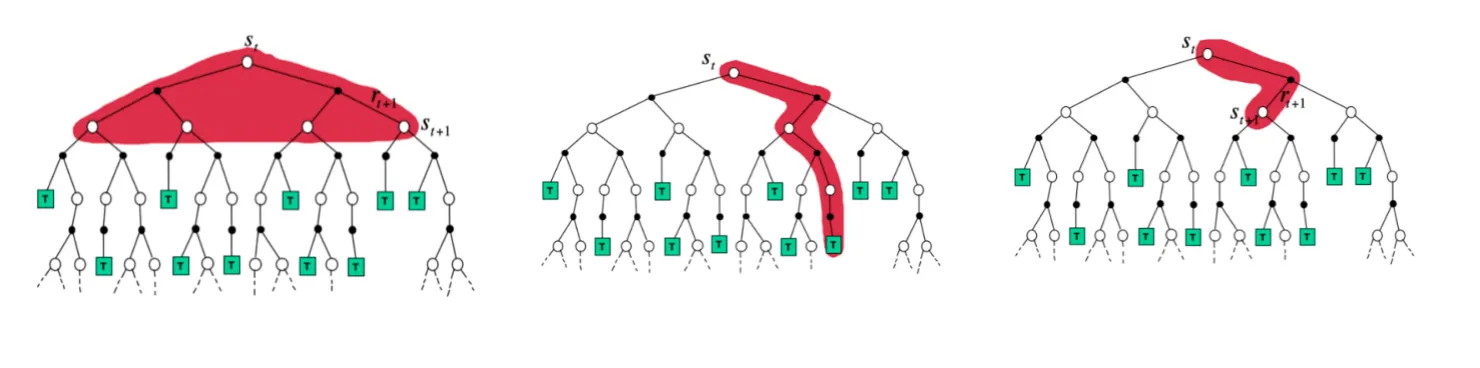 如上图, 从左到右分别是DP, MC, TD (这里是TD(0), 即单步更新) 的视角. DP通过递推相加, 每一个节点都会被计算到; MC每次采样完一整条轨迹. 而TD则是走一步(或几步), 就会对未来的值进行估计.
如上图, 从左到右分别是DP, MC, TD (这里是TD(0), 即单步更新) 的视角. DP通过递推相加, 每一个节点都会被计算到; MC每次采样完一整条轨迹. 而TD则是走一步(或几步), 就会对未来的值进行估计.
时序差分的目的, 就死后对于某个给定的策略 , 在线计算出它的状态价值函数, 即一步一步算. 最简单的算法是一步时序差分(one-step TD), 即TD(0), 它每走一步都更新一次:
上式中, 是学习率, 而 是估计回报, 也可以称为时序差分目标(TD Target), 我们减去和目标的差距, 也被称为TD Error, 对价值函数进行软更新, 以此来不断达到逼近目标.
我们可以看出, 时序差分实际上是一种估计. 首先它同样对期望值采样, 然后最重要的是它使用的是当前估计的V而不是真实的V.
对TD进行推广, 如果调整步数 (step), 就可以变成n步差分算法 (n-step TD). n=1的时候, 就是上述提到的TD(0)或者直接称TD算法, 而当n趋向于无穷, 实际上就就是MC算法.
通过调整步数, 可以进行MC方法和TD方法之间的权衡. 上述方法也被称为基于state value的TD算法.
2. Sarsa
Sarsa时一种同策略时序差分算法 (On-Policy), 也就是说, 它只有一个Q表来实现, 优化和选择都在上面.
Sarsa算法做出的改变很简单, 它把原本TD更新V的过程, 改为了更新Q, 或者说, Sarsa直接估计Q表, 即:
由于每次更新函数值需要知道目前的状态, 当前的动作, 奖励, 下一步的状态, 下一步的动作, 即 , 所以取首字母就构成了Sarsa算法.
Sarsa同样有单步和n步之分, 依据step. 如果给Q机上资格衰减参数 , 就会成为Sarsa() 策略.
3. Q-learning
相比于Sarsa, Q-learning采用的是异策略算法(Off-Policy). 在它学习的过程中, 有两种不同的策略, 目标策略(target policy) 和 行为策略(behavior policy). 我们可以进行直观的比喻, 前者相当于军师的角色, 后者相当于士兵. 士兵的按照自己的策略探索环境, 用 表示, 然后探索出来的轨迹/数据再交给军师, 而且交出的数据中不需要像Sarsa一样包含 .
因为学习策略很多时候太"胆小"了,总倾向于选择目前的最优, 所以有了探索策略.
异策略学习有很多好处:
- 可以用探索学习来学到最佳策略, 学习效率高
- 可以学习其他智能体的动作, 进行模仿学习
- 可以重用旧的策略产生轨迹, 节省资源
当然, 以上的优势主要在加入经验回放后才能体现出来, 对于朴素Q-learning来说, 异策略同样是有好处的.
现在我们来详细介绍Q学习. Q学习在目标策略 上直接采用贪心策略, 按照从Q表里选择最大的来进行. 行为策略 可以是随机的策略, 我们采用 贪心方法.
Q学习的增量表达形式如下, 就形式而言, 其与Sarsa非常相似, 但是要看仔细, 这里的目标是不一样的.
对比Sarsa用同一策略选择 之后再更新Q值, 其目标 , 使用当前的a中使得Q取得最大的贪心结果, 而不需要 , 也就是说Q学习不需要提前知道下一个动作, 只需要前面的 .
当然, 上述更新的式子是隐含异策略的, 只表达了更新时属于完全贪婪, 我们可以将其显式写出, 行为策略 为:
学习策略时 (更新Q值时):
为什么我们要将两个策略分开, 给行为策略选择 算法? 这是其中的核心意义就是, 当前Q值最大的动作不一定是最好的, 因为我们得到的信息不完整, 或者说不能采样所有动作, 有的动作可能根本就没有尝试过. 算法就承认了当前的"最好"可能不是真正的"最好", 所以使用了探索和利用的trade-off, 解决了困境, 有意识探索未知避免陷入局部最优.
专题阅读
Reinforce Learning
这篇文章属于同一条阅读链。你可以直接在这里切换,不用再回到列表页重新找。
部分信息可能已经过时
留言区
留言
欢迎纠错、补充、交流。昵称和评论内容必填;如果你愿意,也可以留下联系方式,仅站主可见。